BIOROBOTICS LABORATORY
SEOUL NATIONAL UNIVERSITY

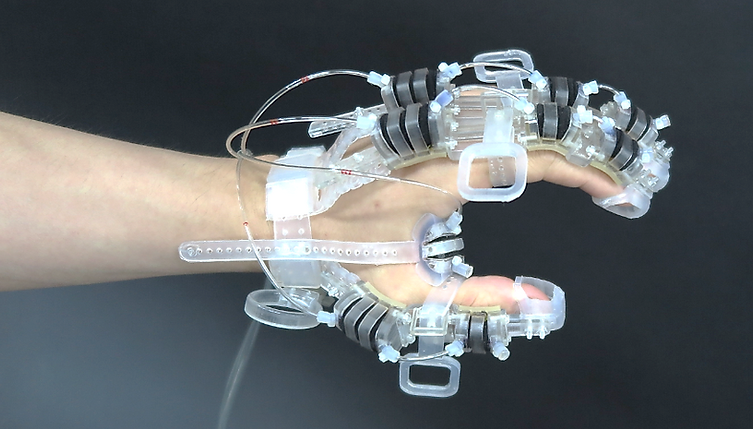
Exo-Glove PM
Customization is an important issue for assistive gloves because it affects glove performance. In this study, we propose an assembly-based customizable soft pneumatic assistive glove, named Exo-Glove PM. Pneumatic soft robots generally consist of a single structure with embedded actuators. However, when assembled, the region where the assemblies are connected easily undergoes large stress concentration which leads to failure. To overcome this issue, we have developed a hybrid actuator module that combines a soft actuation structure and rigid joining methods. In general, rigid joining methods require a bulky design to enable easy assembly, but Exo-Glove PM is designed to create pathways for assembly tools to access the bolt heads by bending certain parts. This novel way of joining assemblies allows soft robots to be built of multiple parts while minimizing the volume. It ensures small module size and enables modules to cover a wide range of hand sizes; the distance between each module is matched to the length of the user’s phalanges using spacers. This approach allows users to customize the glove by assembly of standardized modules and maximizes the comfort and the performance of the glove without custom manufacturing and thus reduces costs.
Keywords : #Assistive, #Hand glove
Related papers and patents
Sung-Sik Yun, Brian Byunghyun Kang, and Kyu-Jin Cho. “Exo-Glove PM: An Easily Customizable Modularized Pneumatic Assistive Glove.” IEEE Robotics and Automation Letters, VOL. 2, NO. 3, July. 2017. [PDF]

· E-mail : yss1215 at snu.ac.kr
· Research Topic : Soft wearable robots & Assistive/ Rehabilitation robots
Ph.D.
Sung-Sik Yun

· E-mail : brianbkang@snu.ac.kr
· Research Topic : Soft wearable robots
Ph.D. / Alumni
Brian Byunghyun Kang
Deployable PneuNets (D-PneuNets) based high compactness robotic glove
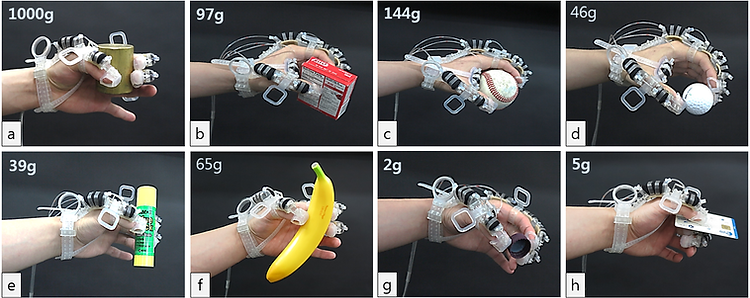
Soft pneumatic networks (PneuNets) actuators are widely considered as a robotic solution for safety and simplicity, yet the trade-off relationship between output force and bulkiness limits usability. In this research, we propose a deployable soft pneumatic networks (D-PneuNets) actuator consisting of origami-designed chambers. In response to applied pressure, the origami chambers rapidly deploy to increase the moment arm, while simultaneously inflating to bend the whole body through asymmetric lengthening and mutual contacts. Consequently, the D-PneuNets actuator can generate relatively large force, and also provide compactness when not in use. Experiment and finite element analysis results show that the D-PneuNets actuator can grow more than 2.5 times of its initial height, and generate an output force more than 10 times higher compared to that of a conventional soft pneumatic networks actuator with the same initial height. In addition, a dual-material origami chamber with relatively stiff side walls was developed to prevent an unnecessary bulge out. A robotic soft glove using D-PneuNets actuators was developed and verified for grasping various everyday-objects. Our approach offers a design strategy to overcome the trade-off relationship of soft pneumatic networks actuators, enabling compact designs of soft robotic devices.
Keywords: #Soft actuator, #origami, #pneumatic

Related papers and patents
Woongbae Kim, Bada Seo, Sung Yol Yu, and Kyu-Jin Cho†, "Deployable Soft Pneumatic Networks (D-PneuNets) Actuator With Dual-Morphing Origami Chambers for High-Compactness," IEEE Robotics and Automation Letters, vol. 7, no. 2, 2021.



· E-mail :jyu134 at snu.ac.kr
· Research Topic : Soft robots
Ph.D. Candidate